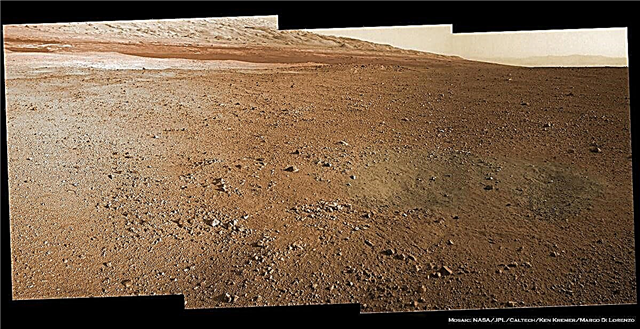
Titulok obrázka: Mozaika hory Mount Sharp na vstupnom mieste kráteru Gale Crater. Kráter Gale v hmlistej vzdialenosti. Táto mozaika bola zošitá z troch obrazov Navcam s plným rozlíšením vrátených pomocou Curiosity na Sol 2 (8. augusta) a vyfarbených na základe snímok Mastcam z 34 milimetrovej kamery. Spracovanie Ken Kremer a Marco Di Lorenzo. Kredit: NASA / JPL-Caltech / Ken Kremer / Marco Di Lorenzo
Rover zvedavosti nasmeroval späť prvé podrobné snímky Mount Sharp a ponúkol úžasný počiatočný pohľad na svoj konečný cieľ jazdy. Dnes je uprostred zásadnej „transplantácie mozgu“, ktorá ju premení na plne funkčný rover.
Vedecký tím nasmeruje šesťkolesovú zvedavosť, aby začala šplhať na horu Sharp niekedy neskôr počas dvojročnej základnej misie v roveroch po prejdení a dôkladnom preskúmaní dna miesta pristátia v kráteru Gale.
Prezrite si naše mozaikové zaostrovanie na základni Mount Sharp pomocou troch obrázkov v plnom rozlíšení nasnímaných navigačnou kamerou Navcam umiestnenou na novo postavenom fotoaparáte a stožiari nástrojov s vyfarbením na základe 34 milimetrovej farebnej kamery Mastcam.
Zvedavosť prišla takmer na ploche na marťanskej ploche, ale s miernym sklonením 3 stupňov spredu dopredu a doterajšie obrázky sú prevzaté z tohto predprogramovaného pohľadu, približne približne šesť kilometrov od základne Mount Sharp.
Terén je posiaty malými kamienkami, ktoré môžu prameniť z neďalekého aluviálneho ventilátora, cez ktorý pretekala tekutá voda už dávno. Pozorovania z obežnej dráhy s NASA Mars Reconnaissance Orbiter odhalili ílové a sulfátové minerály v dolných vrstvách hory Sharp, čo naznačuje vlhkú históriu. Vo vyšších nadmorských výškach vedci dúfajú, že objavia hraničnú vrstvu a náznaky toho, čo viedlo k „veľkej dezinfekčnej udalosti“ a strate tekutej vody na starom marťanskom povrchu.
Tento víkend zvedavosť tiež začala vysielať veľkolepé obrázky z vysokokvalitných snímok Mastcam, ktoré ďaleko presiahnu čokoľvek iné. Tu je panel Mastcam 360, ktorý doteraz zostavila organizácia NASA:

Titulok obrázka: Prvá Hi-Res farebná mozaika zo snímok Mastcam zo zvedavosti. NASA / JPL-Caltech / MSSS
Ale predtým, ako sa robot s veľkosťou automobilu skutočne dokáže obísť, natiahnite ruku so zdvihnutým nástrojom s dĺžkou 7 stôp (2 metre) a naberajte vzorky na analýzu v laboratóriách chemie na palube, aby na splnenie vedeckých úloh potrebovala softvérové inteligentné počítače.
Po splnení všetkých počiatočných cieľov po pristátí strávia inžinieri v laboratóriu Jet Propulsion Lab spoločnosti NASA v Pasadene v Kalifornii 4 dni alebo marťanské dni, pričom tento víkend zaraďujú nový softvérový balík s názvom „R10“, ktorý je optimalizovaný pre povrchové operácie a nahradí aktuálny balík „R9“.
"Navrhli sme misiu od začiatku, aby sme mohli aktualizovať softvér podľa potreby pre rôzne fázy misie," uviedol Ben Cichy z Jet Propulsion Laboratory NASA v Pasadene v Kalifornii, hlavný softvérový inžinier pre misiu Mars Science Laboratory. „Verzia letového softvéru Curiosity v súčasnosti používa [R9] bola skutočne zameraná na pristátie vozidla. Zahŕňa veľa funkcií, ktoré už nepotrebujeme. Poskytuje nám základné možnosti pre prácu s vozovkou na povrchu, ale po pristátí sme naplánovali prechod na verziu letového softvéru, ktorý je skutočne optimalizovaný pre povrchové operácie. “
Softvér na primárnom aj záložnom počítači sa postupne inovuje. Prvým krokom povedal, že v piatok bol úvodný test „toe dip“.
„R10 je optimalizovaný pre povrchové operácie a má to, čo chce vedecký tím. Na podporu tejto fantastickej misie sa sťahuje počas nasledujúcich štyroch solárov, “uviedla Cichy na tlačovom briefingu JPL 10. augusta. Počas inštalácie sa budú stáť pri príprave ďalších štyroch solárov.
"Momentálne máme v základnom softvéri na povrch možnosť skontrolovať stav nástrojov, ale v skutočnosti nemáme schopnosť ísť a plne využívať všetok tento skvelý hardvér, ktorý sme poslali na Mars."
„Softvér R10 nám teda umožňuje plne využívať robotické rameno, používať vŕtačku, používať nástroj na odstraňovanie prachu, používať celý reťazec odberu vzoriek a poškodiť vzorky a analyzovať ich. Všetky tieto vzrušujúce veci, ktoré táto misia urobí . "
"Zvedavosť je marťanský mega rover a rodí sa jazdiť!" R10 nám umožňuje autonómne jazdiť a používať obrázky na detekciu nebezpečenstva a bezpečnú jazdu. “
Aktualizácia softvéru zatiaľ prebieha tento víkend.
Zvedavosť urobila bezprecedentné špičkové pristátie vo vnútri kráteru Gale 5. augusta 6 pomocou raketového stupňa „Sky Crane“, ktorý znížil zvedavosť pomocou káblov na povrch červenej planéty presne podľa plánu na rovinách obkročmo na Mount Sharp len pár kilometrov od základňa gigantickej hory.
Mount Sharp pokrýva väčšinu vnútrozemia kráteru Gale (154 km) širokého (154 km). Vrchol viacvrstvovej hory s výškou 3,4 km (5,5 km) je vyšší ako v Mount Whitney v Kalifornii.
Pre porovnanie si pozrite úvodné zábery širších terénnych post-pristávacích snímok Mount Sharp v 2 D a 3 D od Hazcam kamier s rybím okom nižšie, tu
Zvedavosť 1 ton mega-roveru agentúry NASA je najväčší a najkomplexnejší robot, aký kedy bol odoslaný na povrch inej planéty. Zaznamenáva užitočné zaťaženie 10 najmodernejších vedeckých prístrojov, ktoré vážia 15-krát viac ako akékoľvek predchádzajúce vozidlo. Cieľom zvedavosti je zistiť, či bol Mars niekedy schopný podporovať mikrobiálny život, minulý alebo súčasný, a hľadať príznaky života vo forme organických molekúl.